
引言
在构建多智能体系统的实践中,都会面临一个核心问题:如何让多个 Agent 有效协同工作,而不是互相干扰?
这个问题比表面上看起来更加复杂。当 Agent 数量增加时,协调成本呈非线性增长——简单的任务被过度拆解,独立的 Agent 重复工作,错误在多轮交互中累积放大。Anthropic 在《Multi-Agent Research System》中提到,他们早期的原型系统存在两类典型问题:为简单查询生成 50 个子 Agent,或持续搜索不存在的信息来源导致循环不止。
通过对多个开源项目的深入分析,我们发现优秀的智能体框架在架构设计上存在显著的差异:有的采用消息总线实现解耦,有的使用事件驱动模型提升响应性,有的通过双层队列隔离保证状态一致性,有的则依赖 WASM 沙箱确保安全性。这些不同的技术选型背后,是对”如何组织多智能体协作”这一核心问题的不同回答。
本文旨在探讨多智能体系统架构设计的共性模式,而非介绍某个特定框架的功能。我们希望分享在设计过程中形成的思考模式和实践经验。
阅读全文 »
引言
2026 年初,多智能体系统从「个人玩具」走向「企业工具」。这个过程中有个问题没解决:Agent 怎么知道自己该做什么、不该做什么?
OpenClaw 证明了「本地 Agent + Skill 文件」的威力,但更适合 C 端个人用户。企业需要同样的范式,建立在不同的信任模型上。
我们一直在做类似的事情:Common Agent Framework (CAF),一个面向 B 端的多智能体框架。核心主张:
阅读全文 »

引言
当我们谈论 AI Agent 时,通常关注的是 Agent 本身的能力——如何推理、如何使用工具、如何完成复杂任务。但有一个关键问题经常被忽视:用户如何触达这个 Agent?
OpenClaw 是一个支持多通道的 AI Gateway,Agent 是它的核心能力。它让 AI Agent 能够通过任意渠道(WhatsApp、Telegram、Discord、飞书等)与用户交互。
本文深入分析 OpenClaw 的架构设计,探讨它在 Agent 实现、速度优化等方面的设计思考,以及通用型 Agent 进入 B 端市场后带来的新变化。
阅读全文 »

Palantir 在 2024 年股价翻了三倍,市值突破千亿美元。很多人归因于 AI 浪潮,但真正的秘密藏在一个概念背后——本体论(Ontology)。
这不是哲学课上的”存在的本质”,而是软件开发范式的一次根本性转移。
阅读全文 »
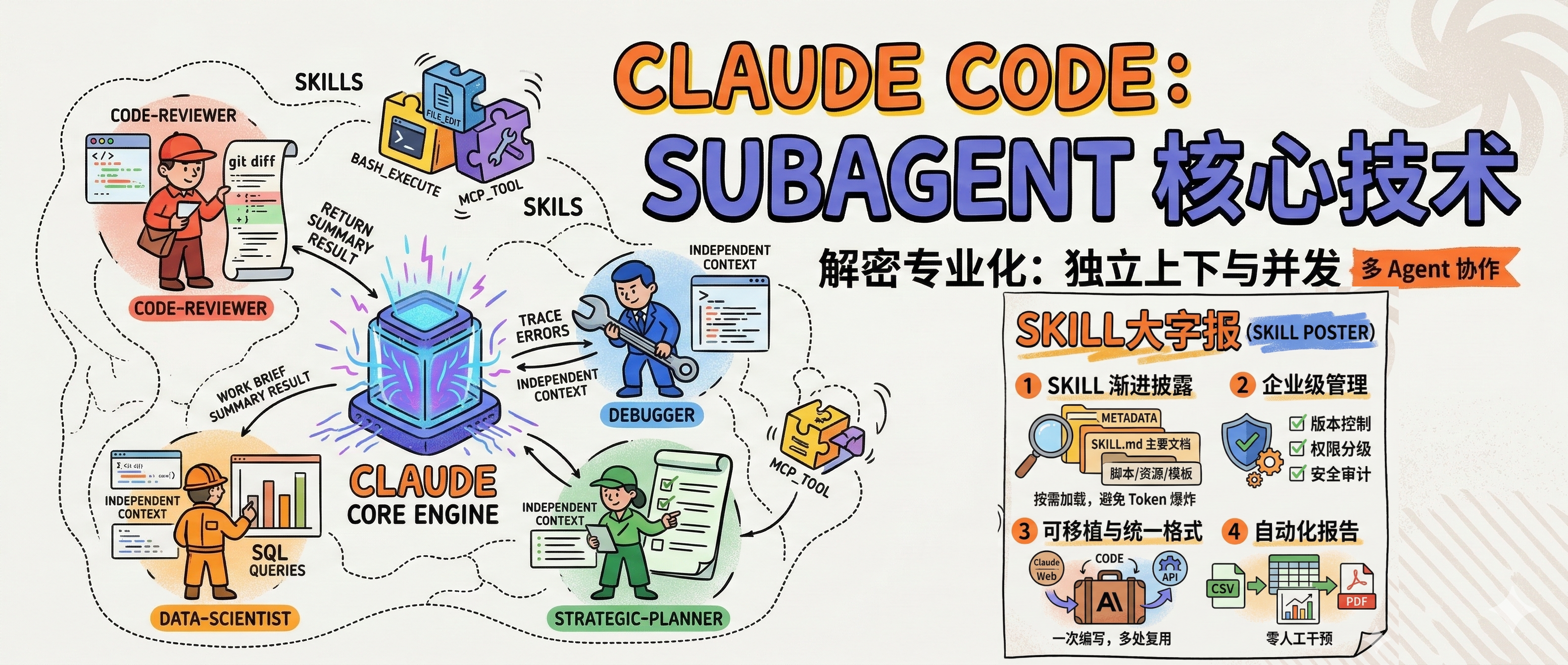
2025年,Claude Code 的出现标志着 AI 编程助手进入了一个新的阶段。它不仅是一个代码生成工具,更是一个完整的技术架构范例。本文将深入分析 Claude Code 的几项关键技术。
阅读全文 »